Autonome und nachhaltige Mobilitätstechnologien ermöglicht durch effiziente und flexible Produktionssysteme – das ist die Vision des InnovationsCampus Mobilität der Zukunft (ICM). Die Partnerinstitute der Initiative der Universität Stuttgart und des Karlsruher Instituts für Technologie (KIT) erforschen hierfür etwa emissionsfreie Antriebskonzepte, Motoren ohne seltene Erden und selbstlernende Automationssysteme. Arbeiten aus diesen Themenfeldern sind die Highlights des ICM-Messeauftritts auf dem baden-württembergischen Gemeinschaftsstand in Halle 12, Stand D15.

Der ICM auf der Hannover Messe: nachhaltig, mobil, wandlungsfähig
- News
Auf der Hannover Messe 2024 unterstreichen der ICM und seine Partner erneut ihre Rolle als Impulsgeber für die Spitzenforschung zu Mobilitäts- und Produktionstechnologien der Zukunft.
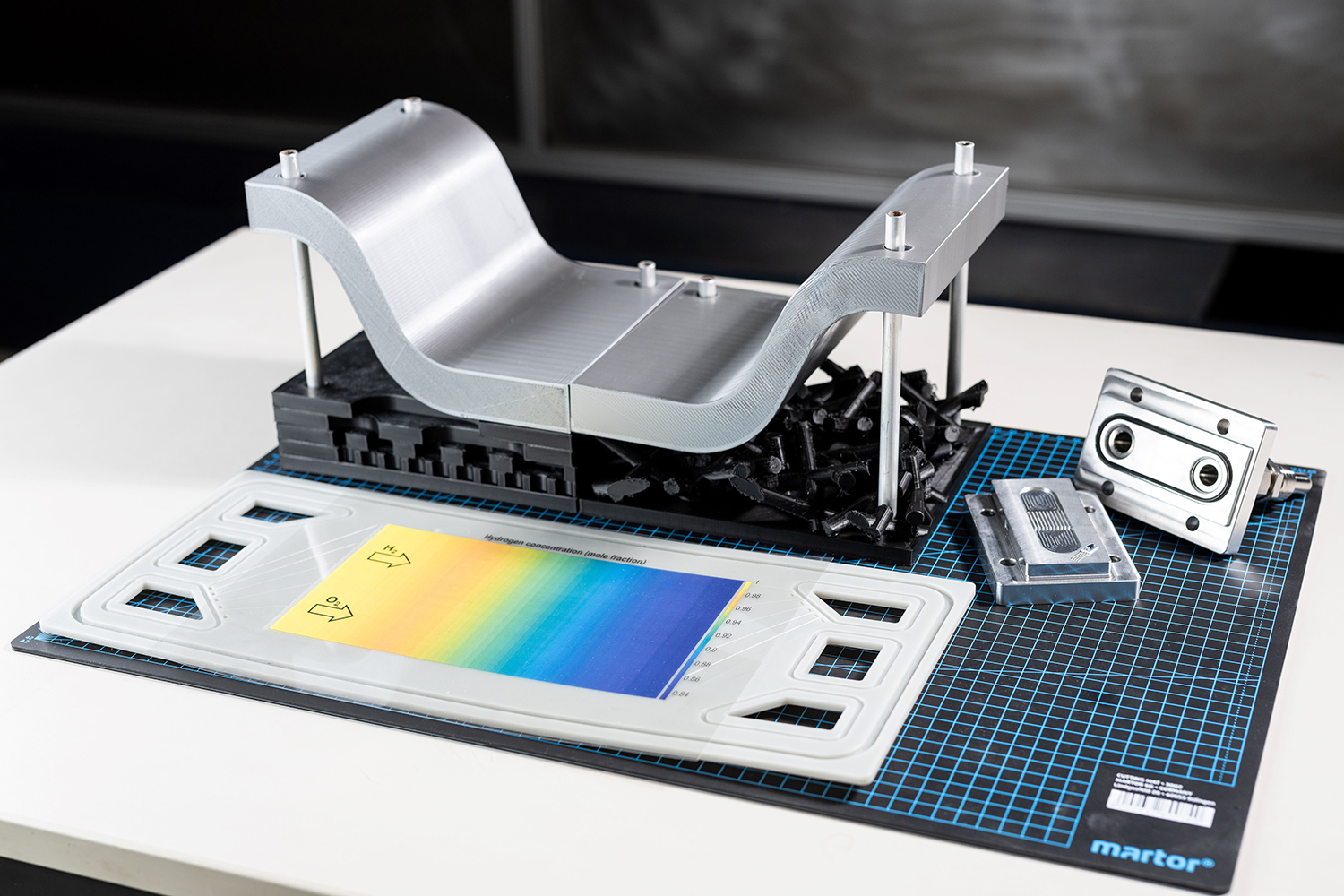
Sensorbasierte Brennstoffzelle
Die Mobilität der Zukunft setzt auf elektrische Antriebe, doch ein Akku ist nicht für jedes Fahrzeug der ideale Energiespeicher. Die Batteriepakete sind relativ schwer und benötigen gerade für große Energiemengen eine lange Ladezeit. Als Alternative bieten sich Brennstoffzellen auf Wasserstoffbasis an, die lokal emissionsfrei arbeiten und bei geringerer Dichte mehr Energie als Batterien liefern. "Die Wasserstofftechnologie ist vor allem für größere Fahrzeuge wie Lastwagen, Busse oder Schiffe ein wichtiger Ansatz", sagt Dr.-Ing. Jan Haußmann vom IPEK – Institut für Produktentwicklung am KIT. Er leitet die ICM-Nachwuchsgruppe "Sensorbasierte Entwicklung von H2-Brennstoffzellen", die auf der Hannover Messe ihre Wasserstoffvision vorstellt. Anhand von Exponaten aus unterschiedlichen Projekten bilden die Forschenden große Teile der Prozesskette ab, die in einem Brennstoffzellensystem abläuft.
Im Zentrum steht ein neu entwickeltes Brennstoffzellenkonzept, das erstmals in dieser Form auf der Hannover Messe ausgestellt wird. Design und Formgebung sind so ausgelegt, dass die Forscherinnen und Forscher die Sensorik direkt in die Hauptkomponente, die Bipolarplatte, integrieren können. Von hier stammen detaillierte Informationen über die lokalen elektrochemischen Reaktionen oder die Degradation der Materialien. Durch die Sensorik wird eine genaue Regelung des Brennstoffzellensystems ermöglicht. "Durch diesen sensorbasierten Ansatz können wir Effizienz und Lebensdauer des Brennstoffzellensystems deutlich erhöhen", erklärt Haußmann.
Zukunftsweisende Produktionstechnologien: KI und Robotik
Effiziente und wandlungsfähige Produktionssysteme eröffnen neue Möglichkeiten, die Nachhaltigkeit des gesamten Mobilitätssektors zu steigern. "Künstliche Intelligenz (KI) und Robotik sind herausragende Zukunftsthemen in der Produktionsautomatisierung, weil sie das Potential bieten, besser mit den auftretenden Toleranzen und Unwägbarkeiten der Produktion umzugehen", sagt Professor Alexander Verl, Leiter des Instituts für Steuerungstechnik der Werkzeugmaschinen (ISW) der Universität Stuttgart und Mitglied des ICM-Forschungsdirektoriums. Selbstlernende und anpassungsfähige Maschinen, die zunehmend komplexere Arbeitsschritte ausführen, sind für die Zukunft der Produktionsstandorts Deutschland fundamental. "Die industrielle Beherrschung Künstlicher Intelligenz ist für den Maschinenbau von entscheidender Bedeutung, da sie uns befähigt, den Fachkräftemangel zu kompensieren, bessere Lösungen effizienter zu realisieren und deren Nachhaltigkeit zu verbessern", ergänzt Professor Andreas Wortmann, Institutsleiter des ISW.
Ein Anwendungsfall, der auf der Hannover Messe gezeigt wird, betrifft das Bordnetz von Fahrzeugen, das mit der datengesteuerten Elektromobilität an Wichtigkeit gewinnt. Im Projekt RoboCable erforschen vier Partnerinstitute des ICM neuartige KI-Methoden für die robotergestützte Manipulation von biegeschlaffen Bauteilen wie Kabel oder Kabelbäumen. Ihre Ergebnisse demonstrieren sie auf der Hannover Messe mit einem Roboter, der mit optischen Sensoren die Position der Stecker detektiert und sie automatisch mit Kabeln bestückt. Seine Bewegungen leitet er dabei skillbasiert anhand einer Statemachine her. Bahnbrechend ist hierbei der schnelle und effiziente KI-Ansatz zur räumlichen Detektion der Steckerpositionen, der die übrigen Automatisierungsschritte erst ermöglicht.
Mit dem gleichen Roboter veranschaulicht die ICM-Nachwuchsgruppe "Digitale Zwillinge als Greybox-Modelle für die Fertigungstechnik" von Dr. Christoph Hinze Forschungsergebnisse zum Iterative Learning durch die Kombination von physikalischen Modellen mit KI-Methoden. Der Demonstrator, der durch ein physikalisches Modell gesteuert wird, kann die Parameter nur annähernd bestimmen, was zu Abweichungen in der Bewegungsbahn führt. Durch mehrmaliges Überfahren und Erfassen lernt der Roboter aus den verbleibenden Bahnfehlern und verbessert seine Genauigkeit kontinuierlich. Diese fortschreitende Verbesserung ist mit dem bloßen Auge kaum erkennbar und wird daher am Messestand auf dem Bildschirm visualisiert. Für Automatisierungsprozesse, die hochgenau mit einer wandelbaren Umgebung interagieren müssen, ist dies entscheidend, beispielsweise beim Lackieren und Schweißen von Karosserieteilen.

© Ludmilla Parsyak, Universität Stuttgart
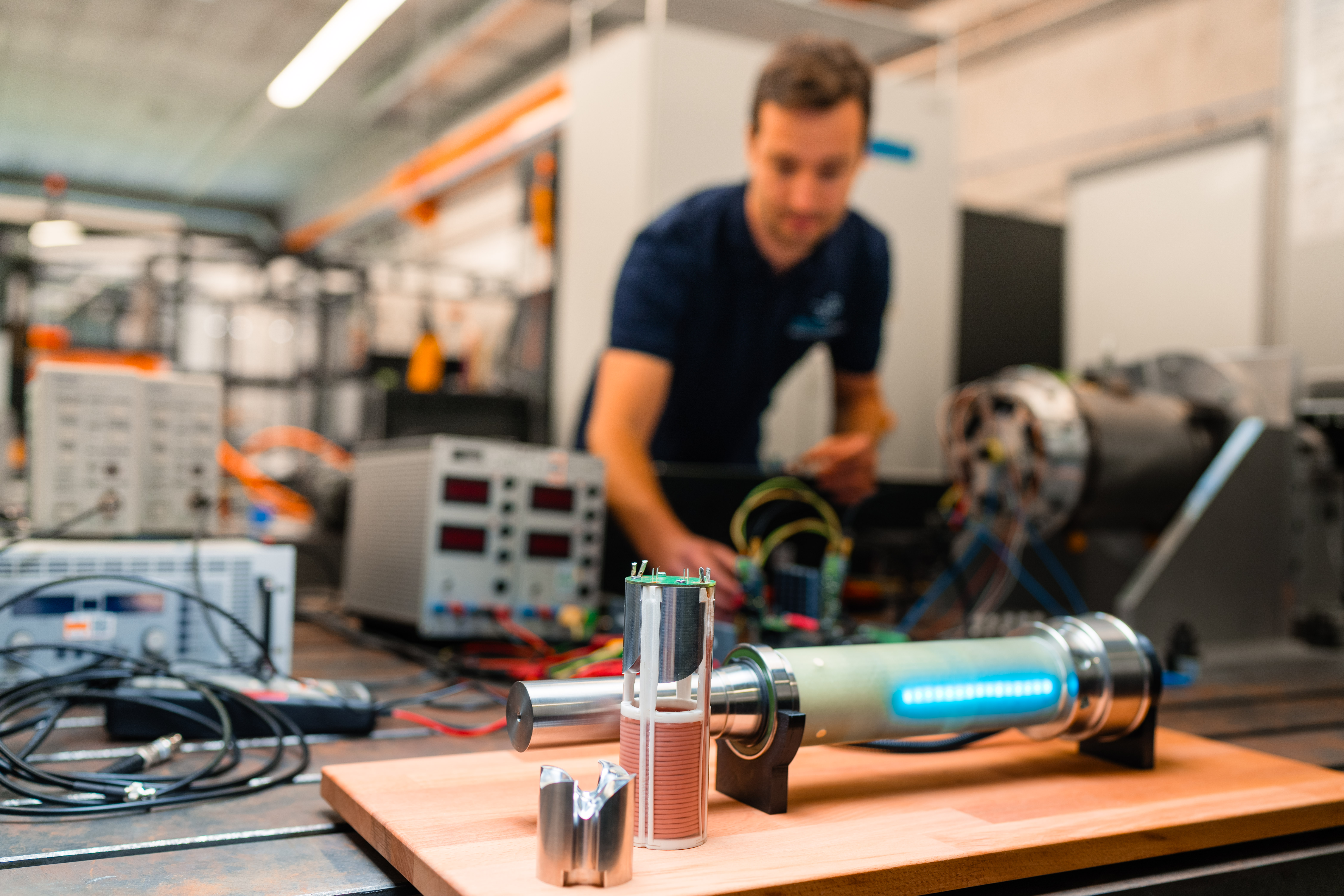
Leichtbau, Nachhaltigkeit und Funktionsintegration an hochleistungsfähigen Elektromotoren
Die Partnerinstitute des ICM berücksichtigen Ressourceneffizienz und Nachhaltigkeit schon bei Design und Konstruktionsprozessen. Ein Forschungsschwerpunkt sind deshalb hochleistungsfähige Elektroantriebe ohne Magnete aus Seltenen Erden wie die induktiv elektrisch erregte Synchronmaschine (IEESM). Das Rotormagnetfeld wird durch eine Spule erzeugt, die ein induktiver Übertrager kontaktlos mit Energie versorgt. Die IEESM ist eine Weiterentwicklung von elektrisch erregten Synchronmaschinen, welche Schleifkontakte nutzen und dadurch Abrieb erzeugen sowie die Leistungsdichte verringern.
Am Institut für Elektrische Energiewandlung (IEW) der Universität Stuttgart ist es Forschenden gelungen, die Übertragerspulen sowie die dazugehörige Leistungselektronik des induktiven Energieübertragungssystems in den Hohlwellenrotor einer IEESM zu integrieren. An diesem Bauteil setzt das ICM-Projekt GIKEES (Glasfaserintegrierte Kontaktlose Energieübertragung für Elektrisch Erregte Synchronmaschinen) an. Die Wissenschaftler des IEW und des Instituts für Flugzeugbau (IFB) haben eine hybride Rotorhohlwelle aus Stahl und glasfaserverstärktem Kunststoff (GFK) entwickelt. Da das Leichtbaumaterial keine elektromagnetische Wechselwirkung hat, kann der induktive Energieübertrager wesentlich kompakter in die Rotorhohlwelle integriert werden. Das Kühlkonzept des induktiven Übertragers in der Rotorhohlwelle wurde vom Institut für Produktentwicklung (IPEK) des KIT entwickelt. Bei stationären Tests erreichte der induktive Übertrager sehr hohe Wirkungsgrade von 95 Prozent.
© Ludmilla Parsyak, Universität Stuttgart
Weitere Projekte des ICM auf der Hannover Messe:
Der Publikumsmagnet des ICM, das Versuchsträgerfahrzeug "eVee", hat schon auf der vergangenen Hannover Messer großes Interesse geweckt. Die Komponenten des leichten Einsitzers sind Ergebnisse aus unterschiedlichen ICM-Forschungsprojekten: Reluktanzmaschinen ohne Seltenen Erden, ein kompaktes Brennstoffzellensystem, Sitze aus nachwachsenden Rohstoffen, additiv gefertigte Radaufhängungen und eine optimierte elektrische/elektronische Architektur.
Ein herausragendes Beispiel additiv-subtraktiver Fertigung ist den Partnerinstituten des ICM mit ihrer Konstruktion einer Transversalflussmaschine gelungen. Nicht nur aufgrund des hochmodernen Fertigungsverfahrens, sondern auch wegen des innovativen Designs. Gezielt eingearbeitete Schlitze auf dem Stator reduzieren die störenden Wirbelströme und steigern damit die Leistungsdichte.
Ein Team des KIT und des Start-Ups MoThor Batteries hat im Rahmen der ICM Innovation Challenge einen Akkupack mit lösbaren mechanischen Zellkontakten entwickelt. Defekte Einzelzellen können direkt im Fahrradgeschäft nebenan ausgetauscht werden. Ursprünglich für einen E-Bike-Akku konzipiert, wird das Projekt nun unter dem Namen BattereVee für größere Fahrzeuge weiterentwickelt.
Zwei weitere ICM-Projekte stellen ihre Ergebnisse im Ausstellungsbereich der Universität Stuttgart in Halle 15, Stand A06 aus. Die Time-Gated Single Pixel Camera (TGSPCam) ist ein neuartiges Sensorkonzept zur Objekterkennung bei suboptimalen Wetterbedingungen wie Schnee oder Nebel. Im Rahmen des Projekts HyLine hat die Materialprüfungsanstalt der Universität ihre neuartige Rührreibschweißzange an einem Industrieroboter erprobt.










Kontakt
Kontakt für Presseinformationen:
Benjamin Büchner
Redaktion und Öffentlichkeitsarbeit, InnovationsCampus Mobilität der Zukunft
benjamin.buechner(at)icm.uni-stuttgart.de