
LAB18 - MOTRAC
Standortübergreifendes Zukunftslabor für die autonome und evolvierende (Re-)Konfiguration von Produktionssystemen
Mit der stetig wachsenden Komplexität in der Produktion und der Logistik steigen die Anforderungen an die Elemente der Fördertechnik. Gerade im Bereich der Pfadplanung und Steuerung von mobilen Robotern sind flexible Ansätze gefordert. Im Projekt MOTRAC entsteht am IFT an der Universität Stuttgart und am IFL am KIT eine Plattform für eine präzise Bewegungserfassung beliebiger mobiler Systeme. Hierdurch soll ermöglicht werden, eigens entwickelte Ansätze mit „Ground Truth‟ (reale Daten, die zum Trainieren von Machine-Learning-Modellen verwendet werden) zu evaluieren, um die Forschung voranzutreiben und wissenschaftliche Publikationen in ihrer Aussagekraft zu unterstützen.
Ziel
Das übergeordnete Ziel des Projekts ist der Aufbau eines Labors für mobile Robotik. Ausgestattet mit hochpräziser Tracking-Technologie ermöglicht es präzise Messungen von Position und Orientierung mobiler Robotersysteme in Echtzeit. Insbesondere die im Rahmen des LAB6 - LabFTS beschafften Fahrzeuge sollen für die Erprobung der entwickelten Algorithmen verwendet werden. Auch speziell das Vorhaben im Projekt INDU4 - Coop_AGV wird durch das System entscheidend ergänzt. Das entstehende Kommunikationsframework und die angestrebte Ausführung kollaborativer Aufgaben von FTF können auf verschiedene Aspekte untersucht werden.
Vorgehen
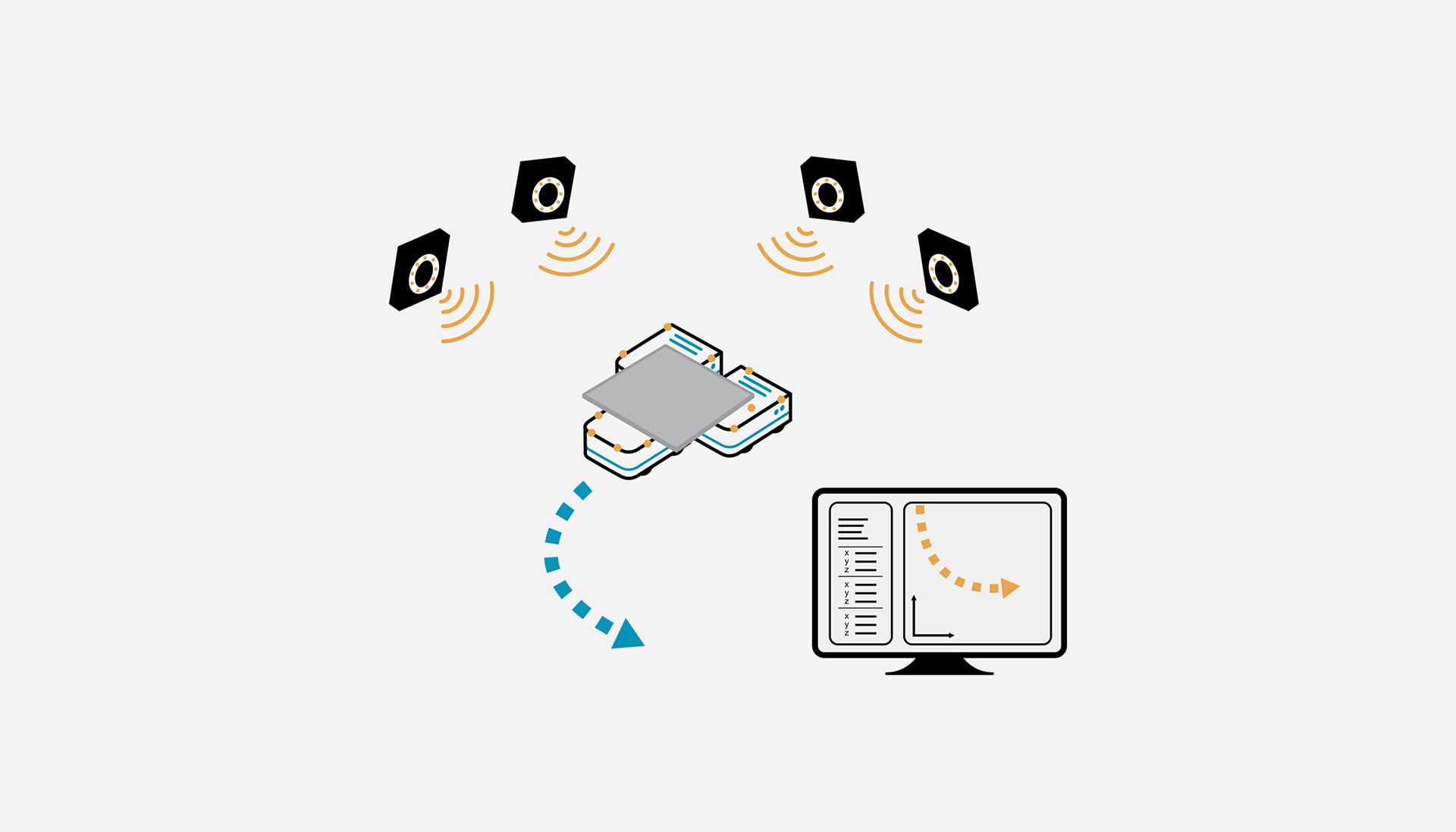
- Optisches Tracking System zur präzisen Erfassung von Position und Orientierung der getrackten Objekte
- Messdaten sollen für die Evaluierung und Validierung entwickelter Algorithmen verwendet werden
Nutzen
MOTRAC dient außerdem als Bildungsplattform, auf der Studierende in Praktika und Abschlussarbeiten ihre entwickelten Algorithmen selbst validieren können. Auch Start-Ups und KMUs wird die Möglichkeit geboten, die Messinfrastruktur für die Evaluierung ihrer Systeme zu nutzen. So unterstützt der Aufbau des Labors die Forschung, Lehre und Unternehmen im Raum Baden-Württemberg.
Eckdaten
Forschungsfeld
Software-System-ArchitecturesProjektlaufzeit
01.12.2023 bis 30.09.2024Projektbeteiligte
- KIT: Institut für Fördertechnik und Logistiksysteme (IFL, Prof. Furmans, Jun.-Prof. Rayyes)
- Universität Stuttgart: Institut für Fördertechnik und Logistik (IFT, Prof. Schulz)
Kontakt
