
LAB18 - MOTRAC
Motion Tracking Robotics Analysis Center
As production and logistics become increasingly complex, the requirements placed on the components of material handling technology are growing. Flexible approaches are required, particularly the aspects path planning and control of mobile robots. In the MOTRAC project, the IFT at the University of Stuttgart and the IFL at the KIT are developing a platform for precise motion detection of arbitrary mobile systems. This is intended to enable specially developed approaches to be evaluated with ground truth (real data used for training machine learning models), thereby promoting research and supporting the meaningfulness of scientific publications.
Aim
The overall aim of the project is to set up a lab for mobile robotics. Equipped with high-precision tracking technology, it is possible to carry out precise measurements of the position and orientation of mobile robot systems in real time. In particular, the vehicles acquired as part of LAB6 - LabFTS will be used to test developed algorithms. In particular, the project INDU4 - Coop_AGV will also be significantly complemented by the new system. The resulting communication framework and the resulting execution of collaborative tasks of AGVs can be examined in various aspects.
Approach
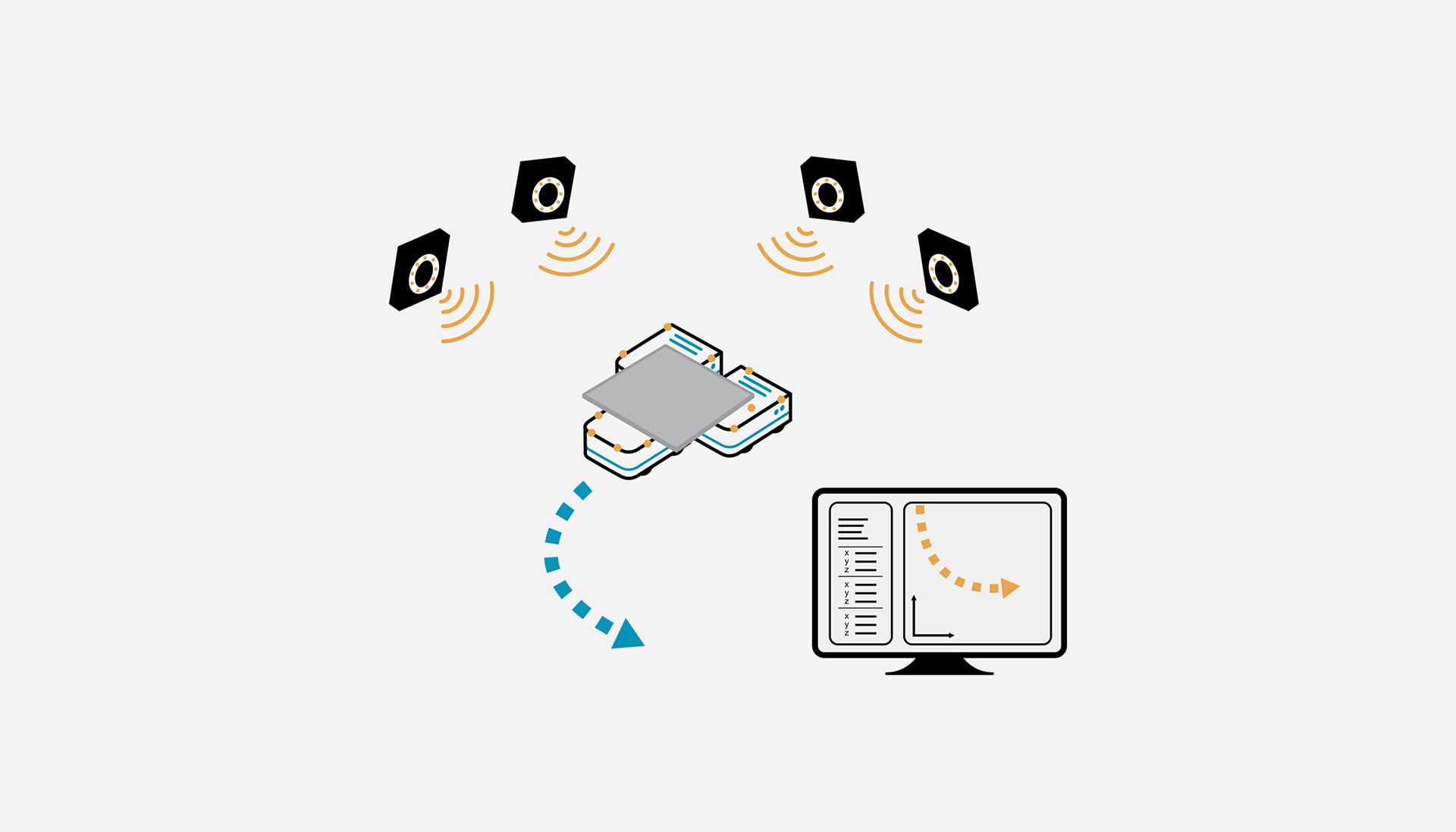
- Optical tracking system for the precise recording of the position and orientation of tracked objects
- Measurement data is to be used for the evaluation and validation of developed algorithms
Benefits
MOTRAC additionally functions as an educational platform on which students can validate the algorithms they have developed themselves in internships and thesis work. Start-ups and SMEs are also offered the opportunity to use the measurement infrastructure to evaluate their systems. It therefore supports research, educational purposes and companies in the Baden-Württemberg region.
Key data
Research Field
Software-System-ArchitecturesPeriod
01.12.2023 until 30.09.2024Project participants
- KIT: Institute for Material Handling and Logistics (IFL, Prof. Furmans, Jun.-Prof. Rayyes)
- University of Stuttgart: Institute of Mechanical Handling and Logistics (IFT, Prof. Schulz)
Contact
