
INDU4 - Coop_AGV
Cooperation Framework for Vehicles in Production and Logistics
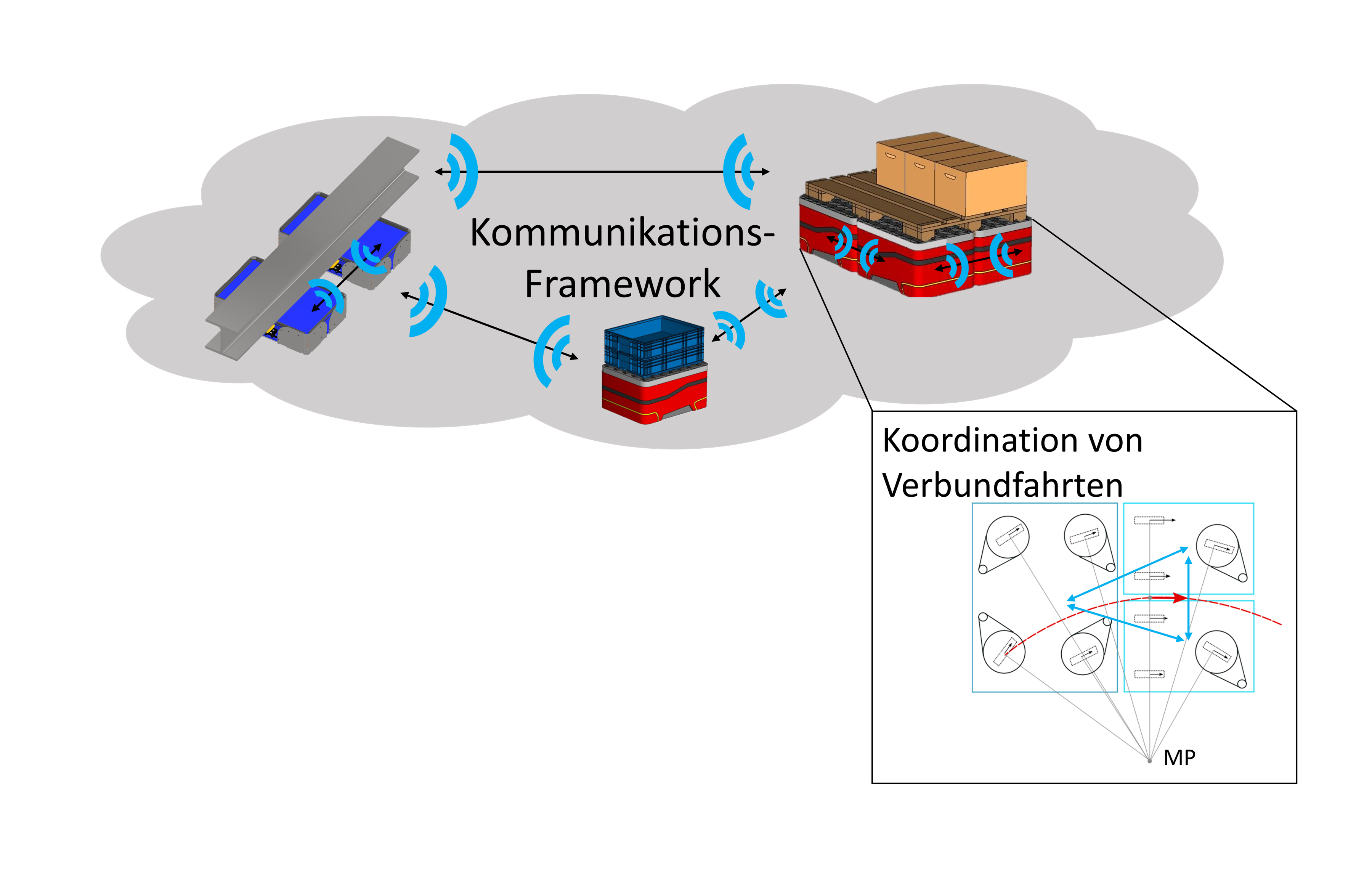
The production of the future must cope with fluctuations in demand and supply bottlenecks and at the same time be sustainable. This requires flexible production. Driverless transport vehicles (FTF) are an important building block for this. Heterogeneous fleets of these mobile robots are already transporting materials in production and have different navigation, steering and driving systems. By joining together to form alliances, they will be able to transport heavy loads and even entire machines in the future. This will require new approaches to decentralized communication between vehicles, in contrast to the current communication via a central system.
Aim, approach and benefit
The project aims to realize flexible and adaptable production through the interaction of different FTFs. The project team is developing a modular framework that must be able to exchange different types of data with varying speed, transmission reliability and size.
The project is divided into two main areas:
- At the IFT of the University of Stuttgart, the interaction is worked out on the basis of the already theoretically derived path specification and the necessary communication between individual FTFs in the network.
- The IFL of KIT investigates the general communication between vehicles and develops a modular framework that enables a standardized, decentralized data exchange.
The project will take up the preliminary work of the participating institutes and demonstrate the flexibility and adaptability potential of FTFs. Numerous project partners from industry (manufacturers of FTF hardware, safety technology and FTF software) are supporting the development of the framework with their expert knowledge.
Key data
Research Field
Software-System-ArchitecturesPeriod
01.01.2023 until 31.12.2024Project participants
- Universität Stuttgart: Institut für Fördertechnik und Logistik (IFT, Prof. Schulz)
- KIT: Institut für Fördertechnik und Logistiksysteme (IFL, Prof. Furmans)
- Participating companies: Bosch Rexroth AG, Formic Transportsystem, NAiSE GmbH, Neobotix GmbH, NODE Robotics GmbH, Pilz GmbH & Co. KG, SEW-EURODRIVE GmbH & Co KG, Things Alive Robotics GmbH
Contact

Thilo Zimmermann
Deputy Managing Director, Head of Research Coordination
- Phone
- +49 711 685 60960
- fk@icm-bw.de