
INDU4 - Coop_AGV
Cooperation Framework for Vehicles in Production and Logistics
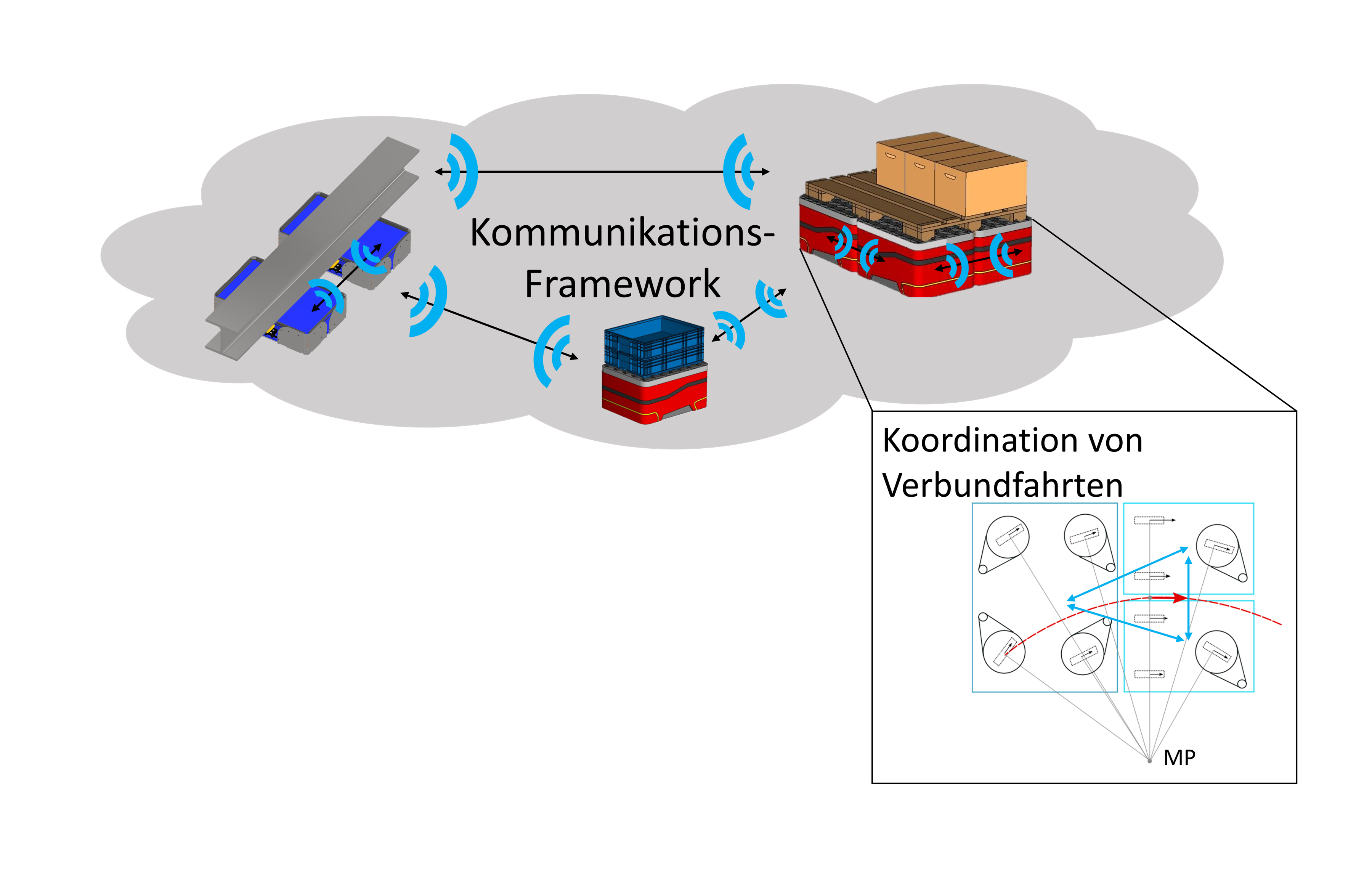
Die Produktion der Zukunft muss Nachfrageschwankungen und Lieferengpässe bewältigen und gleichzeitig nachhaltig sein. Dies erfordert eine flexible Produktion. Ein wichtiger Baustein dafür sind fahrerlose Transportfahrzeuge (FTF). Heterogene Flotten dieser mobilen Roboter transportieren bereits heute Material in der Produktion und verfügen über unterschiedliche Navigations-, Lenk- und Fahrsysteme. Durch den Zusammenschluss zu Verbünden werden sie in Zukunft in der Lage sein, schwere Lasten und sogar ganze Maschinen zu transportieren. Dafür sind im Gegensatz zur bisherigen Kommunikation über ein zentrales System neue Ansätze der dezentralen Kommunikation zwischen den Fahrzeugen notwendig.
Ziel, Vorgehen und Nutzen
Das Projekt zielt darauf ab, eine flexible und wandlungsfähige Produktion durch die Interaktion verschiedener FTF zu realisieren. Das Projektteam entwickelt ein modulares Framework, das in der Lage sein muss, verschiedene Datentypen mit unterschiedlicher Geschwindigkeit, Übertragungssicherheit und Größe auszutauschen.
Das Projekt ist in zwei Schwerpunkte unterteilt:
- Am IFT der Universität Stuttgart wird die Interaktion auf Basis der bereits theoretisch hergeleiteten Wegvorgabe und der dafür notwendigen Kommunikation zwischen einzelnen FTF im Verbund erarbeitet.
- Das IFL des KIT untersucht die generelle Kommunikation zwischen Fahrzeugen und entwickelt ein modulares Framework, das einen standardisierten, dezentralen Datenaustausch ermöglicht.
Das Projekt soll die Vorarbeiten der beteiligten Institute aufgreifen und das Flexibilitäts- und Wandlungsfähigkeitspotenzial von FTF aufzeigen. Zahlreiche Projektpartner aus der Industrie (Hersteller von FTF-Hardware, Sicherheitstechnik und FTF-Software) unterstützen die Entwicklung des Frameworks mit ihrem Expertenwissen.
Eckdaten
Forschungsfeld
Software-System-ArchitecturesProjektlaufzeit
01.01.2023 bis 31.12.2024Projektbeteiligte
- Universität Stuttgart: Institut für Fördertechnik und Logistik (IFT, Prof. Schulz)
- KIT: Institut für Fördertechnik und Logistiksysteme (IFL, Prof. Furmans)
- Beteiligte Unternehmen: Bosch Rexroth AG, Formic Transportsystem, NAiSE GmbH, Neobotix GmbH, NODE Robotics GmbH, Pilz GmbH & Co. KG, SEW-EURODRIVE GmbH & Co KG, Things Alive Robotics GmbH
Kontakt

Thilo Zimmermann
Stellvertretender Geschäftsführer, Leitung Forschungskoordination
- Telefon
- +49 711 685 60960
- fk@icm-bw.de