
BUP32/BUP50 - DynaCharge I/II
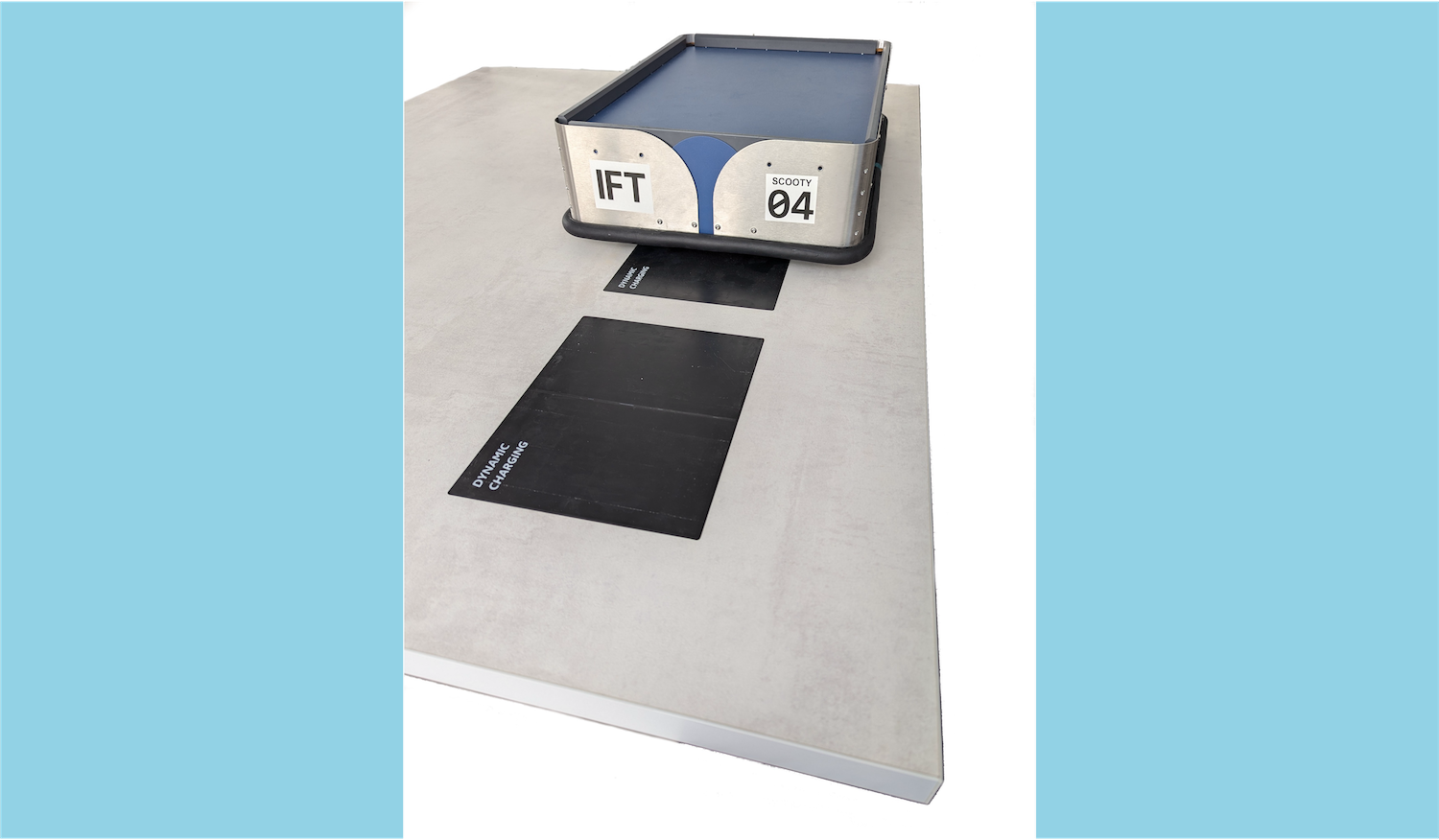
Dynamisches Laden von autonom fahrenden Flurförderfahrzeugen
Flurförderfahrzeuge und Automated Guided Vehicles (AGVs) werden zunehmend in der Intralogistik eingesetzt. Ihre vielfältigen Anwendungsmöglichkeiten zur Optimierung des Materialtransports und der Logistik in verschiedenen Branchen hat zu einer verstärkten Suche nach effizienten Ladelösungen geführt. Hersteller industrieller Ladesysteme stehen vor der Herausforderung, Stillstandszeiten während des Ladevorgangs von AGVs sinnvoll zu nutzen oder zu reduzieren, um weniger AGVs zu benötigen.
Es gibt bereits induktive Ladesysteme in der Intralogistik. Derzeit existieren aber noch keine effizienten dynamischen Ladesysteme für AGVs, die einfach implementiert und nachgerüstet werden können
Ziel
Ziel des Projekts ist es, ein dynamisches Energieübertragungssystem für den Einsatz in der Intralogistik zu entwickeln und zu optimieren. Das System soll einfach aufbau- und nachrüstbar sein. Damit soll eine einfache Integration in bestehende Produktions- oder Logistikumgebungen gewährleitet werden. In Phase II des Projekts soll das bestehende System für eine einfach nachrüstbare Aufboden-Montage für eine flexible Intralogistik abgeändert werden.
Vorgehen
Phase I:
- Konzeptionsüberlegungen
- Aufbau Spulensysteme & Aufbau Hardware
- Programmierung Microcontroller und optionale Features
- Test und Validierung
- Optimierung und Normkonformität
- Kommunikation und Finalisierung
Phase II (nach Aufbau des ersten Prototyps):
- Optimierung hinsichtlich Flexibilität
- Finalisierung eines voll funktionsfähigen und optimierten Prototyps. Vermessung von Wirkungsgrad und Effizienz.
Nutzen
Durch die dynamische Energieübertragung können Stillstandszeiten von Flurförderfahrzeugen vollständig entfallen. Dadurch ist eine Nutzung der Fahrzeuge ohne Unterbrechung möglich und es werden weniger Flurförderfahrzeuge benötigt. In der Produktion und Logistik wird durch die gesteigerte Verfügbarkeit der AGVs und die Senkung der Anschaffungskosten ein deutlicher Mehrwert für Unternehmen geschaffen.
Weiterführende Informationen
- Newsartikel vom 19.04.2024: DynaCharge – Dynamisches Laden von Flurförderfahrzeugen
- Website des Start-ups AMPLINK GmbH

Eckdaten
Forschungsfeld
Software-System-ArchitecturesFörderung
Laufzeit Phase I: 01.01.2024 - 30.06.2024. Laufzeit Phase II: 18.07.2024 - 31.12.2024.Projektlaufzeit
01.01.2024 bis 31.12.2024Projektbeteiligte
- Universität Stuttgart: Institut für Elektrische Energiewandlung (Prof. Parspour)
Kontakt

Thilo Zimmermann
Stellvertretender Geschäftsführer, Leitung Forschungskoordination
- Telefon
- +49 711 685 60960
- fk@icm-bw.de