
BUP32/BUP50 - DynaCharge I/II
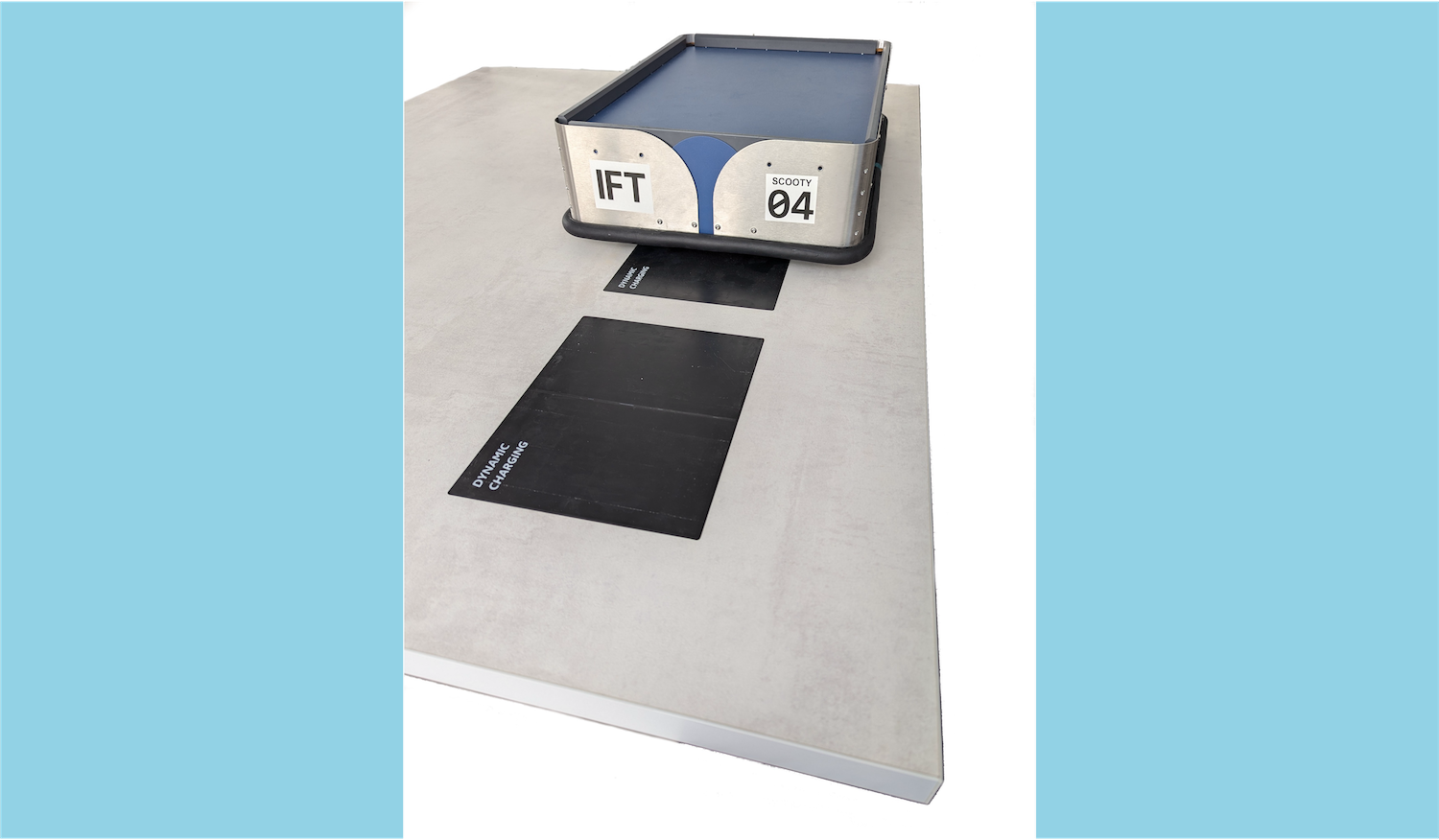
Dynamic charging of autonomous industrial trucks
Automated Guided Vehicles (AGVs) are increasingly used in intralogistics and material handling. The widespread use of AGVs in various industries to optimize material transport and logistics has led to an increased search for efficient charging solutions. Manufacturers of industrial loading systems are challenged by efforts to effectively utilize or reduce the downtimes of AGVs during the charging process in order to minimize the number of required AGVs.
Inductive charging systems already exist in material handling. However, there are currently no efficient dynamic charging systems for AGVs that can be easily installed and retrofitted.
Aim
The aim of the project is to develop and optimize a wireless power transfer system to be used in industrial environments. The system should be easy to set up and retrofittable. Simple integration into existing production or logistics environments should be guaranteed. In Phase II of the project the existing system is to be modified for a floor-mounted assembly that can be easily retrofitted, enabling flexible intralogistics.
Approach
Phase I:
- Conceptual considerations
- Coil design & hardware design
- Programming microcontroller and optional features
- Test and validation
- Optimization and standard compliance
- Communication and finalization
Phase II (after construction of the first prototype):
- Optimization with regard to flexibility
- Finalization of a fully functional and optimized prototype. Measurement of efficiency and effectiveness.
Benefit
The dynamic energy transfer is intended to completely eliminate the downtimes of industrial trucks. This means that the vehicles can be used without interruption and fewer industrial trucks are required. Increased availability of AGVs and reduced acquisition costs create significant added value for businesses in production and logistics.
Further information
- News from April 29, 2024: DynaCharge – Dynamic charging of Automated Guided Vehicle (AGV)
- Website of the Start-up AMPLINK GmbH

Key data
Research Field
Software-System-ArchitecturesPromotion
Duration Phase I: 01.01.2024 - 30.06.2024. Duration Phase II: 18.07.2024 - 31.12.2024.Period
01.01.2024 until 31.12.2024Project participants
- University of Stuttgart: Institute of Electrical Energy Conversion (Prof. Parspour)
Contact

Thilo Zimmermann
Deputy Managing Director, Head of Research Coordination
- Phone
- +49 711 685 60960
- fk@icm-bw.de