
IC10 - RoboKoop
Autonome mobile Roboter in Kooperation mit stationären Robotern
In vielen Bereichen der Logistik werden Kommissionierprozesse noch manuell durchgeführt. Dabei müssen zum Beispiel im Lebensmittelbereich viele, häufig schwere, Kollis (eine Verpackungseinheit in der Logistik) gehandhabt werden.
Um diese Prozesse zu automatisieren, sollen zukünftig vermehrt Robotersysteme eingesetzt werden, welche das Personal entlasten. Die Zuführung der Paletten mit den zu kommissionierenden Produkten und der Abtransport der fertig kommissionierten Paletten wird meist durch stationäre starre Fördertechnik umgesetzt. Solche Kommissioniersysteme verursachen hohe Investitionskosten und haben einen großen Platzbedarf.
Ziel, Vorgehen und Nutzen
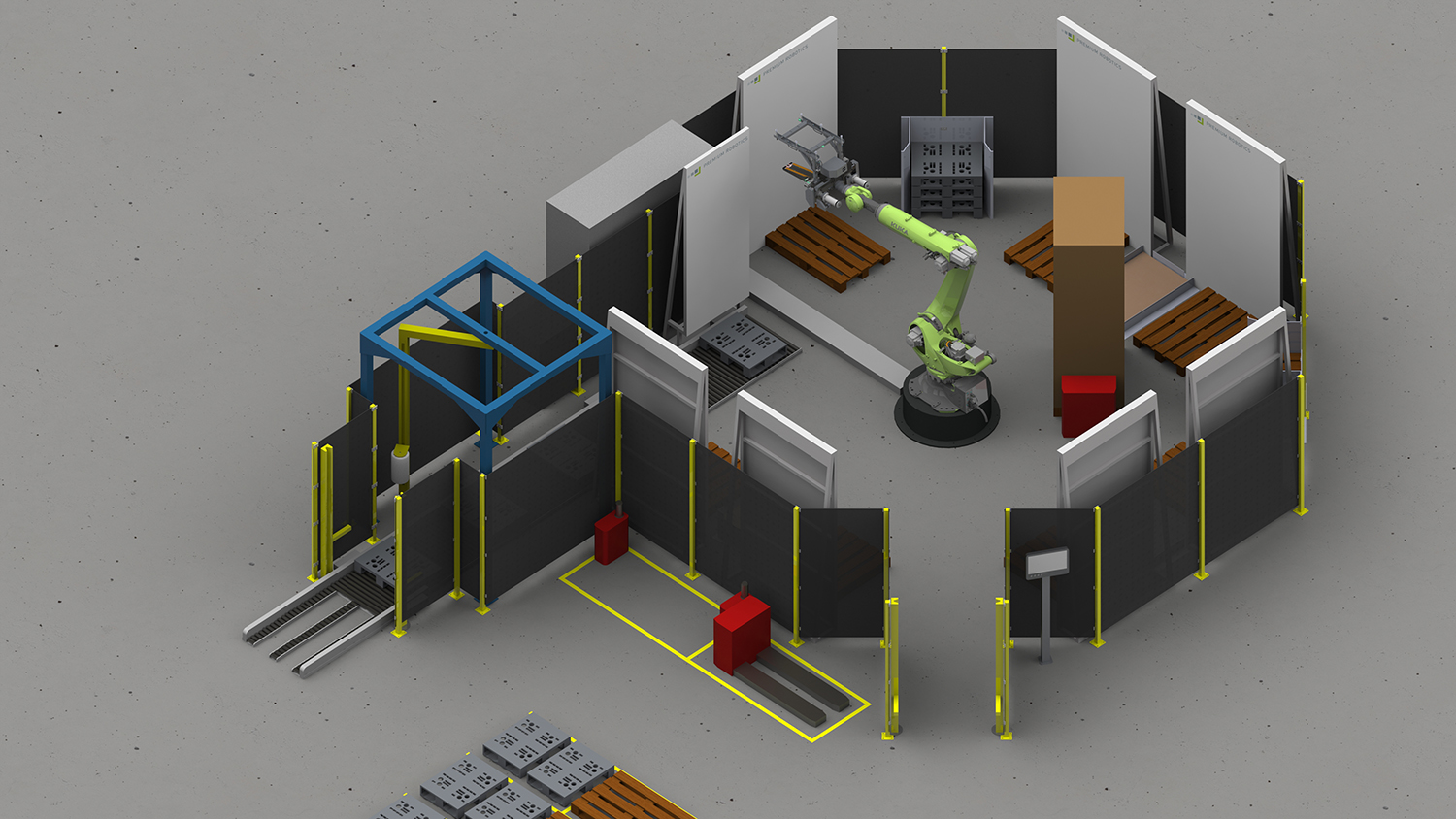
Ziel des Projektes ist es, eine Kommissionierzelle mit einem stationären Roboter mit Paletten mittels fahrerloser Transportfahrzeuge (FTF) flexibel zu ver- und entsorgen. Dabei soll ein am IFT der Universität Stuttgart entwickeltes Doppelkufensystem als FTF eingesetzt werden. Es entfällt die starre und unflexible Fördertechnik, die sehr viel Bauraum benötigt und hohe Kosten verursacht.
Das Doppelkufensystem ermöglicht es, Paletten direkt vom Boden aufzunehmen und zu transportieren, während es vollständig unter der Palette verschwindet. Dadurch werden die Fahrwege minimiert und der freiwerdende Platz in der Kommissionierzelle kann effizient genutzt werden, um mehr Paletten bereitzustellen.
Im Rahmen des Projektes wird das Doppelkufensystem an die Anforderungen der Kommissionierzelle angepasst. Eine wesentliche Rolle spielt dabei die Machine-to-Machine (M2M-)Kommunikation zwischen dem starren Kommissionierroboter mit seinem Aufwälzgreifer und den FTF. Die Bewegungen sollen dabei harmonisch synchronisiert werden, um während des Palettentransports innerhalb der Kommissionierzelle einen kontinuierlichen Betrieb des Roboters zu ermöglichen und potenzielle Kollisionen zu vermeiden. Die Stillstandszeiten werden damit erheblich reduziert.
Eckdaten
Forschungsfeld
Software-System-ArchitecturesProjektbeteiligte
- Universität Stuttgart: Institut für Fördertechnik und Logistik (IFT)
- Beteiligtes Unternehmen: robomotion.GmbH
Kontakt

Thilo Zimmermann
Stellvertretender Geschäftsführer, Leitung Forschungskoordination
- Telefon
- +49 711 685 60960
- fk@icm-bw.de