
IC10 - RoboKoop
Autonomous mobile robots in cooperation with stationary robots
In many fields of logistics, picking processes are still carried out manually. In the food sector, for example, many, often heavy, packages have to be handled.
In order to automate these processes, robotic systems will be increasingly used in the future to relieve the personnel. The feeding of the pallets with the products to be picked and the removal of the finished pallets is usually implemented using stationary rigid conveyor technology. Such picking systems cause high investment costs and require a large space.
Aim, approach and benefit
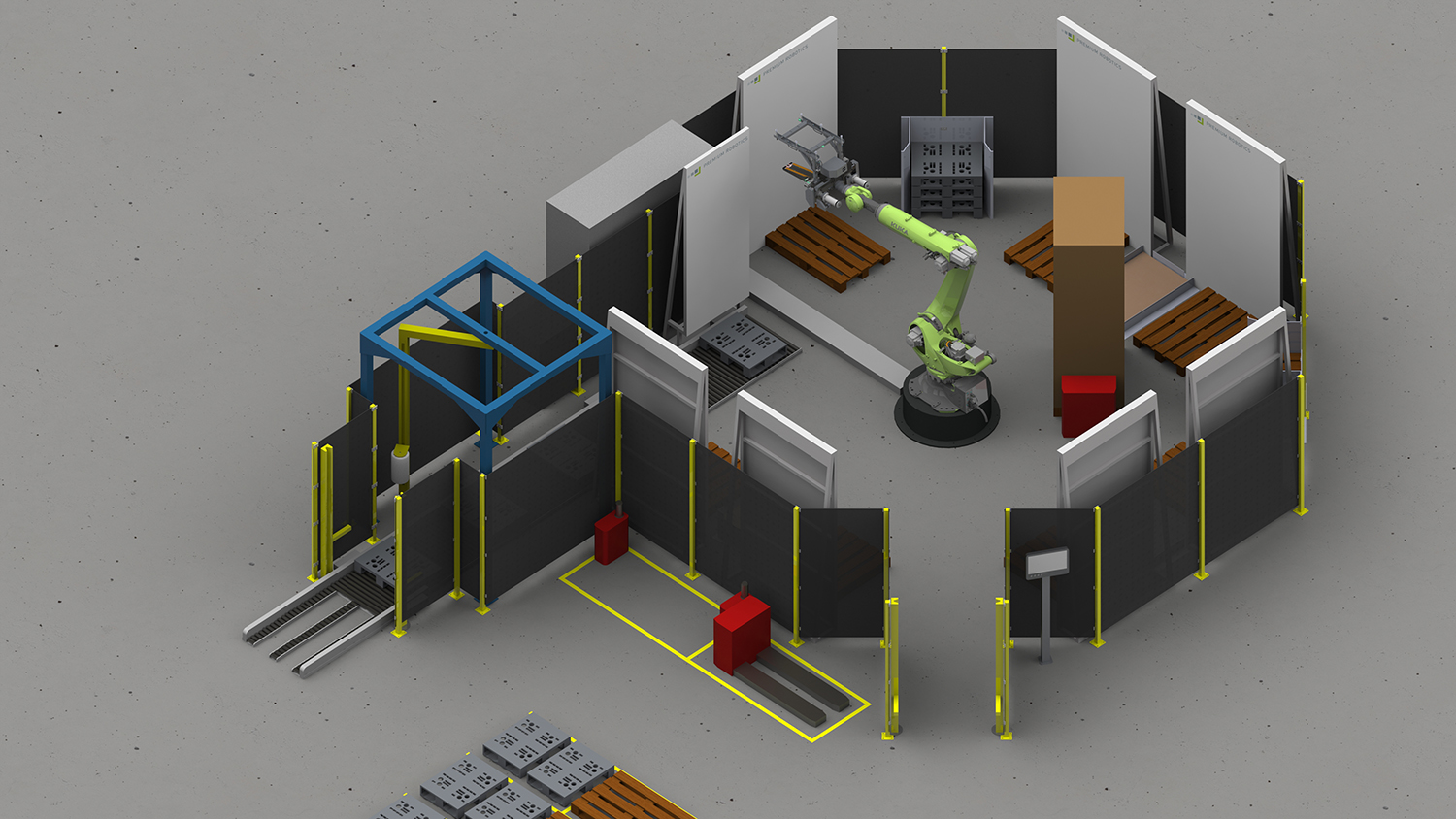
The aim of the project is to flexibly supply and dispose of an order picking cell with a stationary robot with pallets by means of automated guided vehicles (AGVs). The double skid system developed at the IFT at University of Stuttgart is to be used as an AGV. This will eliminate the need for rigid and inflexible conveyor technology that requires a lot of installation space and causes high costs.
The double skid system makes it possible to pick up and transport pallets directly from the floor while disappearing completely under the pallet. This minimizes travel distances and the space freed up in the picking cell can be used efficiently to provide more pallets.
Within the scope of the project, the double skid system is adapted to the requirements of the order-picking cell. Machine-to-machine (M2M) communication between the rigid order-picking robot with its roll-up gripper and the AGV also plays an important role. The movements are to be synchronised harmoniously that during pallet transport within the picking cell, the robot can continue picking without collisions. Thus, downtimes are reduced considerably.
Key data
Research Field
Software-System-ArchitecturesProject participants
- Universität Stuttgart: Institut für Fördertechnik und Logistik (IFT)
- robomotion.GmbH
Contact

Thilo Zimmermann
Deputy Managing Director, Head of Research Coordination
- Phone
- +49 711 685 60960
- fk@icm-bw.de