
BUP26 - PedPosPred
Pedestrian Pose Prediction: Vorhersagen für menschliche Posen im Straßenverkehr
Die präzise Modellierung von Fußgängerposen ist für Fahrerassistenzsysteme essenziell, da sie in Echtzeit agieren müssen. Die Komplexität steigt, weil die Erkennung oft nur aus einer Perspektive erfolgt, was die Datenqualität einschränkt. Diese Schwierigkeit wird akzentuiert, wenn anatomische Beschränkungen der Gelenke außer Acht gelassen werden. Jedes Gelenk hat durch Faktoren wie Knochenbau und Muskelansatz definierte Bewegungsgrenzen. Ignorieren Modelle diese Grenzen, können sie unrealistische oder gefährliche Vorhersagen treffen, was in sicherheitskritischen Bereichen wie Fahrerassistenzsystemen inakzeptabel ist. Daher ist die Berücksichtigung der anatomischen Limitationen jedes Gelenks unerlässlich für realitätsnahe und zuverlässige Vorhersagen.
Ziel und Vorgehen
Ziel des Projekts ist die Weiterentwicklung moderner Techniken zur Modellierung menschlicher Gelenkwinkel, insbesondere für den Einsatz in Fahrerassistenzsystemen. Im Zentrum steht die Anpassung von Normalizing Flows an die speziellen Gegebenheiten der Gelenkwinkel-Mannigfaltigkeiten.
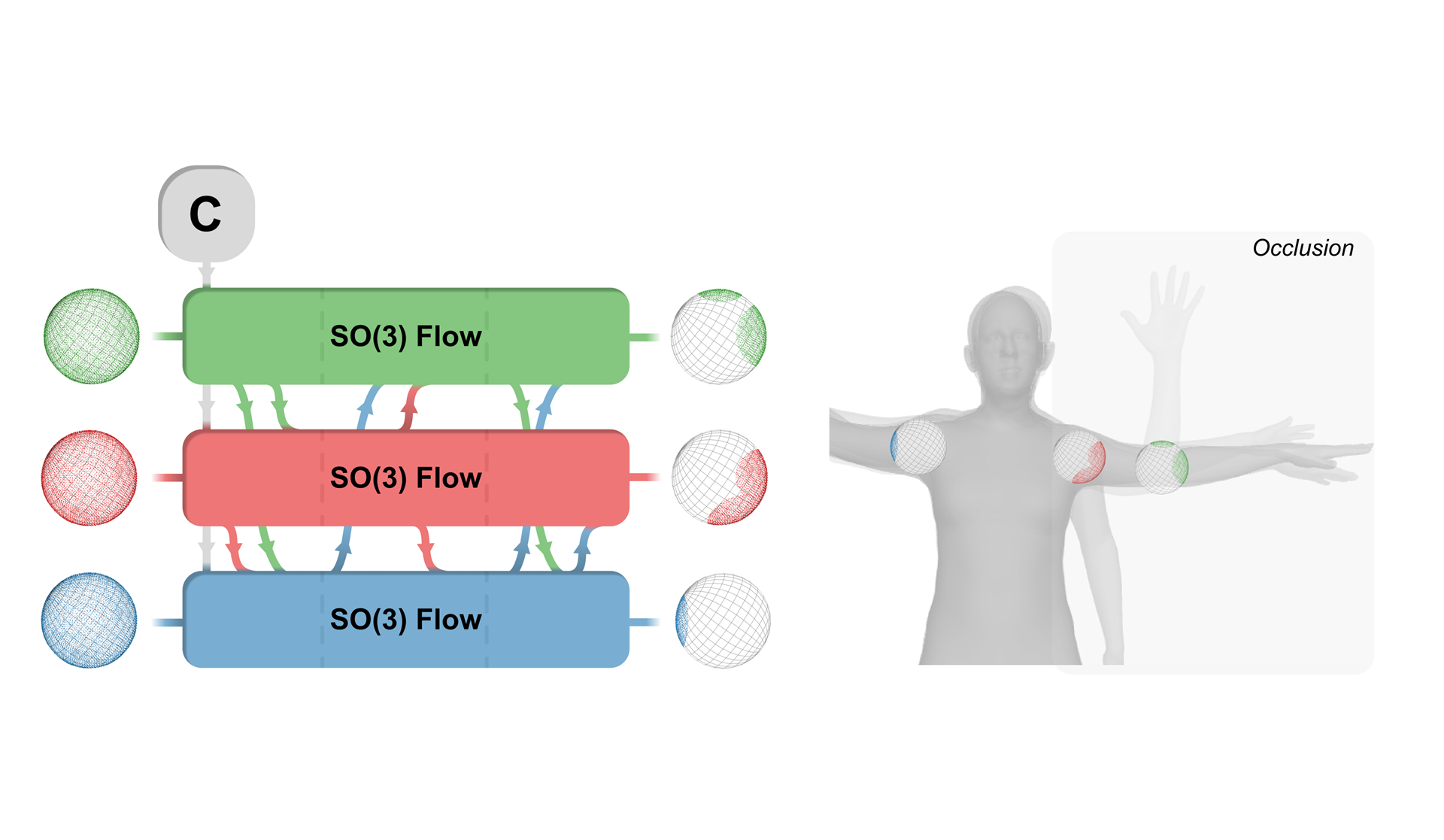
In diesem Projekt wird ein Modellierungsansatz auf Basis von Normalizing Flows entwickelt. Diese Technik ermöglicht nicht nur eine präzise Abbildung der anatomischen Limitationen, sondern auch das Erfassen komplexer Korrelationen zwischen verschiedenen Gelenken. Ein besonderer Fortschritt ist die Fähigkeit, auch auf nicht sichtbare Gelenkwinkel zu schließen. Die Theorie wird darüber hinaus erweitert, um kartesische Produkte von Gelenkwinkeln zu modellieren, wodurch Korrelationen zwischen mehreren Gelenken noch effektiver berücksichtigt werden können.
Nutzen
Der Nutzen dieses Ansatzes liegt in der signifikanten Verbesserung der Genauigkeit und Zuverlässigkeit von Vorhersagen in sicherheitskritischen Bereichen wie Fahrerassistenzsystemen. Die innovative Methode ermöglicht eine realitätsnahe Modellierung und eröffnet damit neue Anwendungsfelder, von der Verkehrsforschung bis hin zur Medizintechnik. Durch die Berücksichtigung anatomischer Grenzen und komplexer Korrelationen wird eine neue Ebene der Genauigkeit erreicht, die bisherige Modelle nicht bieten konnten.
Eckdaten
Forschungsfeld
Software-System-ArchitecturesProjektlaufzeit
01.05.2023 bis 31.01.2024Projektbeteiligte
- KIT: Institut für Anthropomatik und Robotik, Lehrstuhl für Intelligente Sensor-Aktor-Systeme (ISAS, Dr.-Ing. Pfaff)
Im Rahmen des Projekts kam es zur Kooperation mit der TU München und Google Research.
Kontakt
