
BUP26 - PedPosPred
Pedestrian Pose Prediction: Vorhersagen für menschliche Posen im Straßenverkehr
Accurate modeling of pedestrian poses is crucial for driver assistance systems, which often operate in real-time. The complexity rises as detection often occurs from a limited perspective, constraining the quality of the data. This challenge is exacerbated if anatomical limitations of joints are neglected. Each joint has defined motion ranges, determined by factors like bone structure and muscle attachments. If models overlook these limits, they may produce unrealistic or even dangerous predictions, which is unacceptable in safety-critical applications like driver assistance systems. Thus, accounting for the anatomical limitations of each joint is essential for realistic and reliable predictions.
Aim and approach
The aim of the project is to advance modern techniques for modeling human joint angles, particularly for use in driver assistance systems. Central to this is adapting Normalizing Flows to the unique requirements of joint angle manifolds.
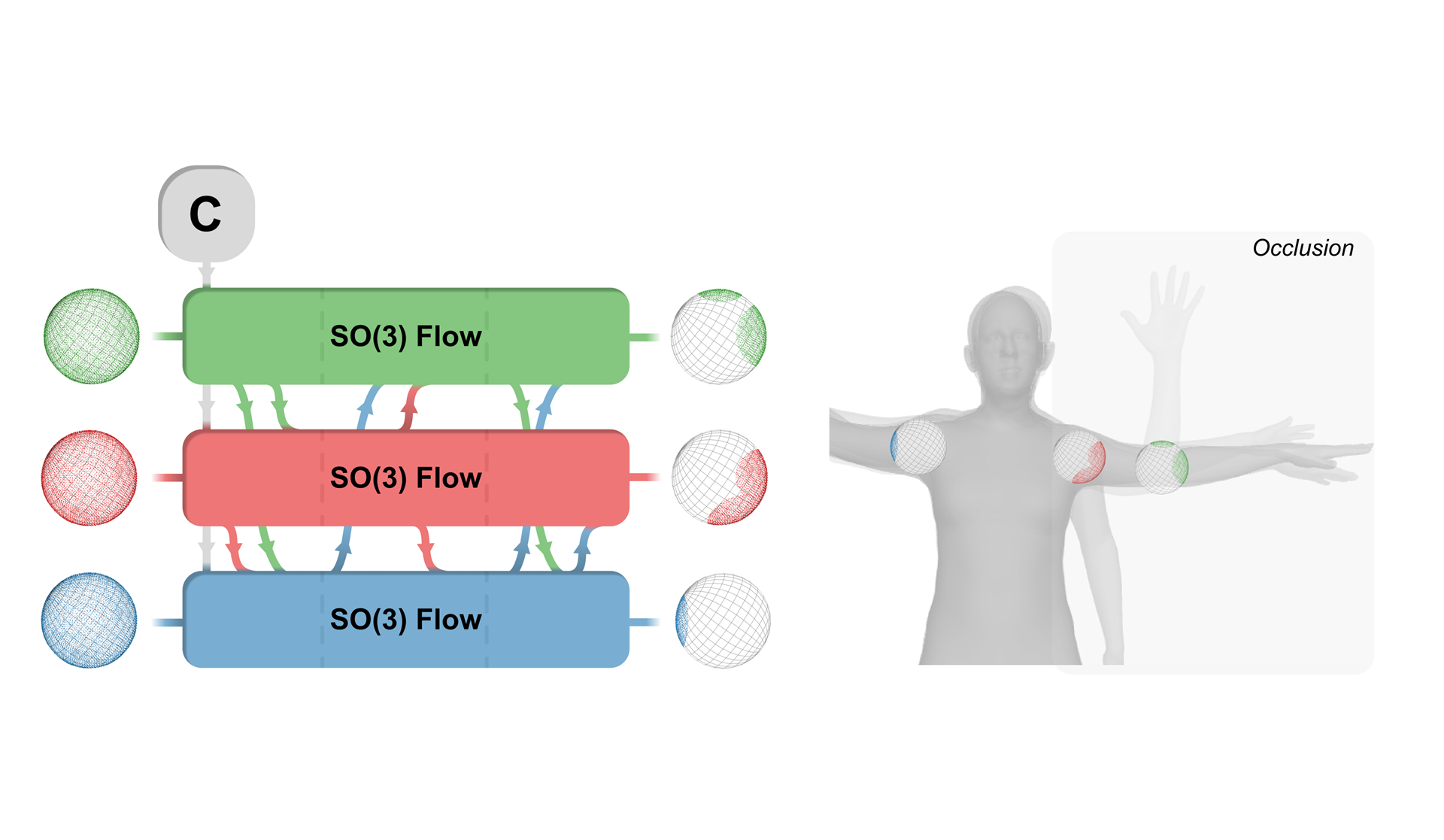
This project involves developing a modeling method based on Normalizing Flows. This technique not only allows for accurate mapping of anatomical limitations but also captures complex correlations between various joints. A particular advancement is the ability to infer information about non-visible joint angles. Furthermore, the theory is extended to model Cartesian products of joint angles, thereby more effectively accounting for correlations between multiple joints.
Benefit
The utility of this approach lies in significantly improving the accuracy and reliability of predictions in safety-critical areas such as driver assistance systems. The innovative method allows for more realistic modeling, opening up new applications ranging from traffic research to medical technology. By taking into account anatomical limitations and complex correlations, a new level of accuracy is achieved, surpassing existing models.
Key data
Research Field
Software-System-ArchitecturesPeriod
01.05.2023 until 31.01.2024Project participants
- KIT: Institut für Anthropomatik und Robotik, Lehrstuhl für Intelligente Sensor-Aktor-Systeme (ISAS, Dr.-Ing. Pfaff)
During the project, a cooperation was established with the TU Munich and Google Research.
Contact
