
BUP20 - TEDZ
Transportable echtzeitfähige digitale Zwillinge
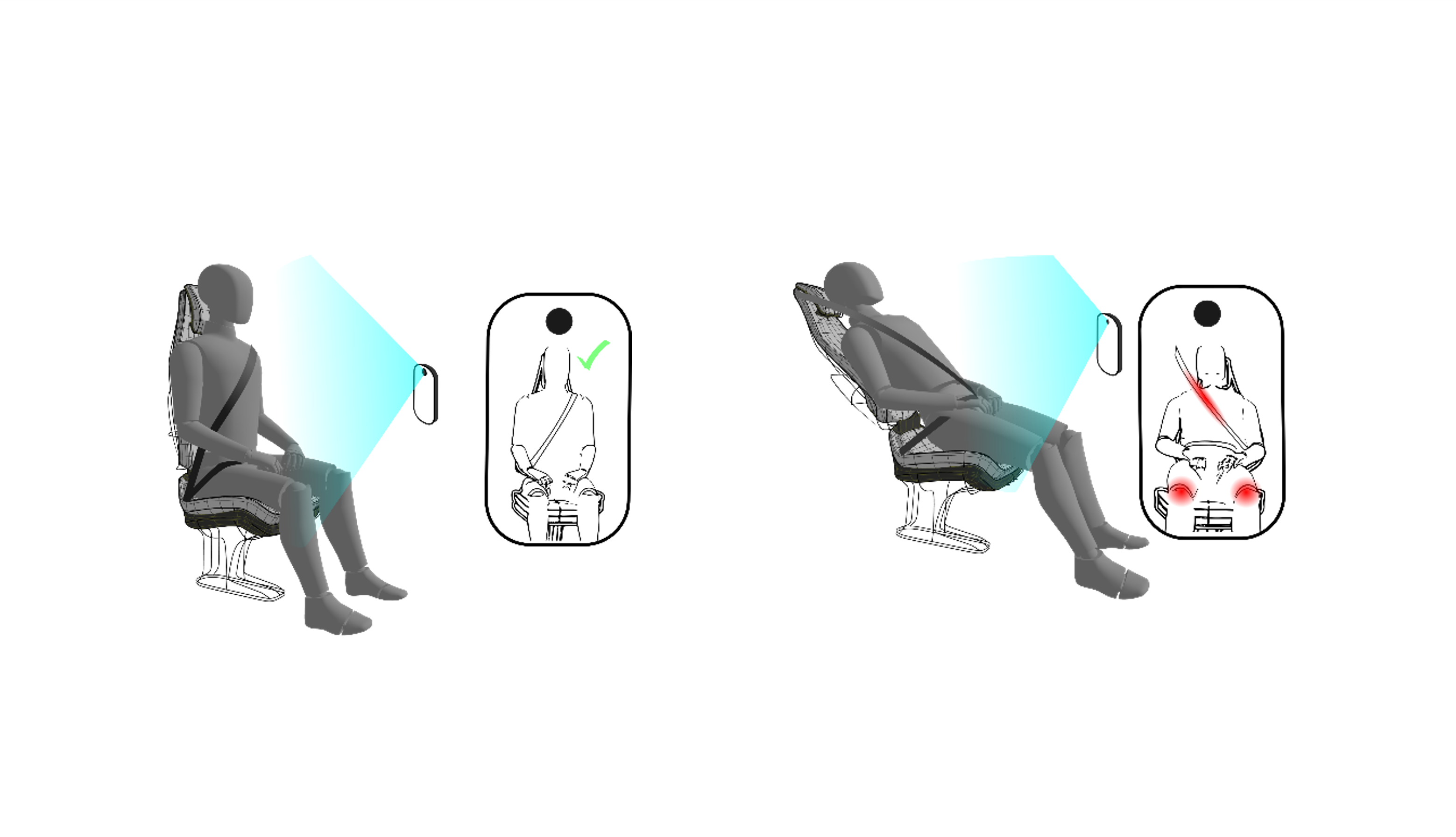
Autonomes Fahren ermöglicht neue Sitzpositionen, welche nicht direkt ersichtliche Sicherheitsrisiken bergen. Insassen-Monitoringsysteme zur Überwachung der Körperhaltung samt Rückmeldung stellen eine vielversprechende Sicherheitsmaßnahme zur Minimierung des Verletzungsrisikos dar. Sie sind aber oft teuer und schlecht verfügbar.
Im Projekt wird ein Smartphone-gestütztes Überwachungssystem entwickelt, das nicht nur die Haltung der Insassen überwacht, sondern zeitgleich eine Sicherheitsbewertung auf Basis hochkomplexer Simulationsmodelle durchführt und in kritischen Fällen rückmeldet. Dadurch können Insassen die Vorteile des autonomen Fahrens genießen, ohne sich neuen Risiken auszusetzen.
Vorgehen
Im Projekt ist geplant
-
effiziente Menschmodelle anhand der vorhergesagten Verletzungen von fortschrittlichen Crash-Simulationen abzuleiten, welche
-
der Körperhaltung eines Passagiers ein Verletzungsrisiko zuordnen können und
-
durch eine Kombination von Modellreduktion und Maschinellem Lernen echtzeitfähig sind
-
-
die Positionen und Haltung des Insassen anhand von Kameraaufnahmen eines Smartphones zu rekonstruieren
-
einen transportablen echtzeitfähigen digitalen Zwilling der Insassen auf dem Smartphone zu implementieren und rechnen zu lassen
Eckdaten
Forschungsfeld
Software-System-ArchitecturesProjektlaufzeit
01.10.2022 bis 30.06.2023Projektbeteiligte
- Universität Stuttgart: Institut für Technische und Numerische Mechanik (ITM, Jonas Kneifl und Jörg Fehr)
Kontakt
