
BUP41 - pH-SynRM
Multi-hierarchical port-Hamiltonian modeling of permanent magnet assisted synchronous reluctance machines
When modeling complex systems, the consideration of different physical domains and thus expert knowledge from a wide variety of areas is indispensable.
The coupling and definition of interfaces between the models from various departments and domains is one of the greatest challenges in today's product development process.
A generally valid description of these interfaces makes the overall models modular and can provide flexible, appropriate and quick answers to urgent questions, thereby increasing the quality of the end product.
Goal
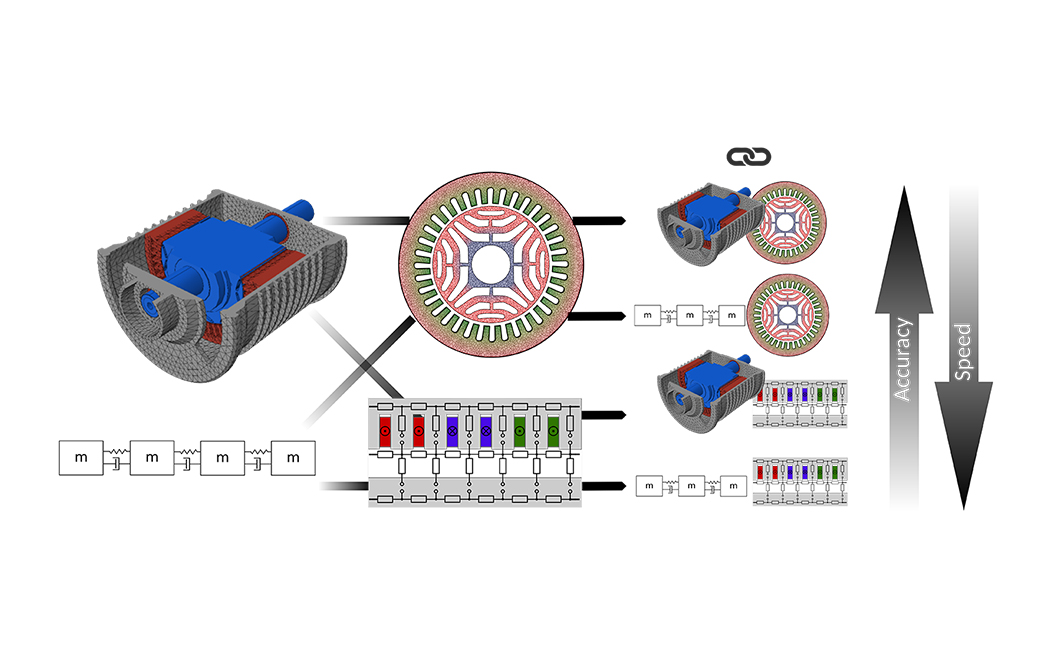
Based on the challenging modeling of a permanent magnet assisted synchronous reluctance machine (SynRM), a hierarchical model is to be developed. To this end, the promising scientific results in the field of modular port-Hamiltonian (pH) formulation are to be transferred into practice. Due to its modularity, the model should be both flexible in its complexity and open for model extensions.
Approach
-
Description of the primary domains involved (mechanical & electromagnetic) in energy variables
-
Definition of power-preserving couplings that respect the port-Hamiltonian Dirac structure and thus the laws of nature
-
Flexible coupling of the various physical submodules to the overall pH-SynRM model
Benefits
If successfully tested, the type of modeling described and the workflow developed can serve as a blueprint for other physical systems, thereby accelerating the product development process and improving the quality of the products.
The findings from the simulations of the different hierarchical levels serve to optimize the SynRM as a sustainable alternative in modern mobility.
Further information
The modeling and optimization of SynRM with a different objective was worked on in the ReMoS project.
Key data
Research Field
Mobility TechnologiesPeriod
01.06.2024 until 31.12.2024Project participants
- University of Stuttgart: Institute of Engineering and Computational Mechanics (ITM)
Contact
